Build Your Own Butler Robot!!! - Tutorial,Photos, and Video
by Erobots in Circuits > Robots
128639 Views, 347 Favorites, 0 Comments
Build Your Own Butler Robot!!! - Tutorial,Photos, and Video



EDIT: More info on my projects check out my new website: narobo.com
I also do consulting for robotics , mechatronics, and special effects projects/products. Check out my website - narobo.com for more details.
Ever wanted a butler robot that talks to you , follows you around , and even pours you drinks? Read this instructable to learn how to build your own voice controlled butler robot which has many cool features.
This tutorial will show you how to make the butler robot , but any improvements that I add after this tutorial is finished will not be edited into this tutorial, but rather it will appear on my robotics blog : eRobots.BlogSpot.com . eRobots.BlogSpot.com My blog has a lot of cool robotics and electronics stuff, so check it out!
Please note that this tutorial can be modified to each person's needs and you do not have the follow the exact dimensions that I wrote. To make it easier for users I did write the dimensions that I used if they wanted a reference point.
I built my first version of my butler robot in 2007 and in June 2008 I began to make a newer version. The older version can be seen here:
http://i273.photobucket.com/albums/jj202/erobot/Chives%20Original/DSC01588.jpg
The Functions of The Butler Robot:
1. Voice Commands for weather, time, and temperature
2. Pour a drink bottle into a cup
3. Manual control with a joystick
4. Cool soda cans in a mini fridge
5. Face recognition and greet people by their names
6. Follow a person wearing a certain color shirt
7. Avoid obstacles
8. Automatically dock to a charger
9. Sweep the floor
10. Wireless control over the internet
11. Wireless Remote Control from iPod Touch or SmartPhone
PLEASE VOTE FOR ME
I WORKED VERY HARD TO MAKE THIS TUTORIAL VERY CLEAR AND EASY TO FOLLOW.
Someone told me that this looks like dalek from Doctor Who. Holy cow it does and I didn't even hear about Dalek or even Doctor Who until this morning!
MY PROMISE: If I win this contest and win a ticket to RoboGames, I will make a sleeker , cooler version of my butler robot ( equipped with tri-tracks, CNC body, better robot arm) in 2009. I will enter that butler robot in RoboGames 2009 AND I will document that revised version even more than I documented this robot! That's gonna be a very very detailed tutorial!
So please vote for me !!!
I also do consulting for robotics , mechatronics, and special effects projects/products. Check out my website - narobo.com for more details.
Ever wanted a butler robot that talks to you , follows you around , and even pours you drinks? Read this instructable to learn how to build your own voice controlled butler robot which has many cool features.
This tutorial will show you how to make the butler robot , but any improvements that I add after this tutorial is finished will not be edited into this tutorial, but rather it will appear on my robotics blog : eRobots.BlogSpot.com . eRobots.BlogSpot.com My blog has a lot of cool robotics and electronics stuff, so check it out!
Please note that this tutorial can be modified to each person's needs and you do not have the follow the exact dimensions that I wrote. To make it easier for users I did write the dimensions that I used if they wanted a reference point.
I built my first version of my butler robot in 2007 and in June 2008 I began to make a newer version. The older version can be seen here:
http://i273.photobucket.com/albums/jj202/erobot/Chives%20Original/DSC01588.jpg
{kind=link}
The Functions of The Butler Robot:
1. Voice Commands for weather, time, and temperature
2. Pour a drink bottle into a cup
3. Manual control with a joystick
4. Cool soda cans in a mini fridge
5. Face recognition and greet people by their names
6. Follow a person wearing a certain color shirt
7. Avoid obstacles
8. Automatically dock to a charger
9. Sweep the floor
10. Wireless control over the internet
11. Wireless Remote Control from iPod Touch or SmartPhone
PLEASE VOTE FOR ME
I WORKED VERY HARD TO MAKE THIS TUTORIAL VERY CLEAR AND EASY TO FOLLOW.
Someone told me that this looks like dalek from Doctor Who. Holy cow it does and I didn't even hear about Dalek or even Doctor Who until this morning!
MY PROMISE: If I win this contest and win a ticket to RoboGames, I will make a sleeker , cooler version of my butler robot ( equipped with tri-tracks, CNC body, better robot arm) in 2009. I will enter that butler robot in RoboGames 2009 AND I will document that revised version even more than I documented this robot! That's gonna be a very very detailed tutorial!
So please vote for me !!!
Bill of Materials

Here is the final bill of materials. I divided it up into sections and included prices. So break open your piggy bank and collect the money , you'll be surprised it costs less than $500 !!! ( not including laptop)
Please note that this is what I paid , I will include some comments on items I feel could be purchased for cheaper. These prices are not final and a lot of them I am not exactly sure of what I paid since a lot were lying around my workshop for months and I don't remember the exact prices , only their relative ones.
I purchased all my parts from eBay ,Jameco, Home Depot , and AllElectronics.com . I used parts that are very common to find so you shouldn't have trouble finding any of them.
Tools:
1. Drill
2. Electric Screwdriver
3. Soldering Iron with solder
4. Hot Glue Gun
5. Small flat head screwdriver
6. Scissors
7. Wire Stripper
8. Some sort of saw to cut the wood
9. Black Spray Paint Canister - $5
10. Silver Spray Paint Canister - $5
Chassis:
1. Two Wheelchair Motors - $100 on eBay
2. One 14" x 21" plywood 3/4" thick - $2 ( this depends on how big a piece of wood you buy and how much you cut)
3. Four machine screws ( this depends on what the wheelchair mounting holes accept) - $0.64
4. Four washers for the machine screws - $0.50
5. One caster to support at least 150lbs - $5.40
6. Two screws to mount your caster ( this also depends on what the caster mounting holes accept) - $0.32
Motor Control:
1. Eight 30amps automotive relays (cheapest I found is herehere) - $19.20
2. Four dual relay sockets (cheapest can be found herehere) - $12.00
3. Two 12V 20AH batteries ( you could really just get one and that would suffice) - $60.00
4. Phidgets 0/16/16 (I bought from TrossenRobotics.com , though eBay sometimes has them) - $99.00
5. Some 22 ga. or thicker black wire( get a 20ft roll and that will be enough for the whole project) -$3.00
6. Some 22ga. or thicker red wire ( 20ft roll will suffice for the whole project as well)-$3.00
7. Different color of electrical tape ( yellow,black,red,white) - $2.69
8. See through plastic cover - $2.00
9. Six L brackets ( each angle is 3" and 2" thick) - $3.00
10. Eight #8 x 1" drywall screws - $0.16
11. One 120V Light Switch w/ at least 14 ga. wires attached - $5.49
Lower Body:
1. Two 14.5" x 8" plywood 3/4" thick -$4.00
2. Two of 11.5" x 8" plywood 3/4" thick - $4.00
3. One of 14.5" x 13" Plexiglas 1/4" thick - $3.00
4. Seventeen #8 x 1" drywall screws - $0.34
5. Three L brackets ( each angle is 3" and 2" thick) - $1.50
6. Six #8 x 1/2" thick plastic spacers - $0.12
Upper Body:
1. One 5.5" x 9" plywood 3/4" thick- $1.00
2. One 5" x 9" plywood 3/4" thick - $1.00
3. Two 10" x 21" plywood 3/4" thick - $4.00
4. One 9" x 11.5" plywood 3/4" thick - $1.00
5. One 9" x 21" plywood 3/4" thick - $2.00
6. One 12VDC Automotive MiniFridge - $15.00 ( got lucky on eBay)
7. Six L brackets( each angle is 3" and 2" thick)-$3.00
8. Two #8-32 x 1/4" machine screw with two nuts and washers- $0.50
9. Twenty two #8 x 1" drywall screws - $0.44
Robot's Head:
1. 12" diameter cake cover - $1.29
2. One 1.5" dia. PVC slip-joint nut - $0.75
3. One PVC 7" x 1.5" diameter $ 3.00
4. One webcam - $5.00 ( eBay is a wonderful place)
Robot Arms :
1. Robot Arm Grabber Toy - $10
2. Two 1.5" dia. PVC slip-joint nut - $1
3.One 2" length PVC coupling - $0.50
4. Two 1.5" dia. PVC threaded pipe that is at least 4" long ( this can be cut into a straight piece) - $1
5. Two 17" x 1.5" dia. PVC pipe - $ 4.00
6. Five L brackets( each angle is 3" and 2" thick) - $2.75
7. Four #8 x 1.75" drywall screws - $0.08
8. Four small L brackets ( servocity has similar http://servocity.com/html/534-633_bracket.htmlones, but theres always eBay :P ) - $0.60
9. One 6V NimH battery(I used that) or 6V battery pack(cheaper) - $11
10. HS-425BB servo( electronics were fried so I got it cheap) - $5
11. Rim of a 4" dia. Lego Wheel- $0.15
12. 1.5" dia. duct connector - $3.00
13. Motorized back wheels of toy R/C car - $1.00 ( eBay has a large selection of broken R/C cars whose motors still work)
14. Two skinny L brackets ( its like 3" long at each angle but only 1/2" wide) - $0.50
15. Eleven #8 - 1" drywall screws - $0.22
Plus the laptop of choice --- this can be anywhere from $100 - $3000 . I used an old one that was lying around
Also I want you all to know that around 50% of all the parts I had from beforehand in my workshop so it only costed me like 50% of the total price listed here. You too probably have a bunch of the above parts lying around your house or perhaps you have friends who would be willing to donate parts, just use your resources and you could make this thing much cheaper than it is now.
Total Bill: $420.14 + laptop of choice
Please note that this is what I paid , I will include some comments on items I feel could be purchased for cheaper. These prices are not final and a lot of them I am not exactly sure of what I paid since a lot were lying around my workshop for months and I don't remember the exact prices , only their relative ones.
I purchased all my parts from eBay ,Jameco, Home Depot , and AllElectronics.com . I used parts that are very common to find so you shouldn't have trouble finding any of them.
Tools:
1. Drill
2. Electric Screwdriver
3. Soldering Iron with solder
4. Hot Glue Gun
5. Small flat head screwdriver
6. Scissors
7. Wire Stripper
8. Some sort of saw to cut the wood
9. Black Spray Paint Canister - $5
10. Silver Spray Paint Canister - $5
Chassis:
1. Two Wheelchair Motors - $100 on eBay
2. One 14" x 21" plywood 3/4" thick - $2 ( this depends on how big a piece of wood you buy and how much you cut)
3. Four machine screws ( this depends on what the wheelchair mounting holes accept) - $0.64
4. Four washers for the machine screws - $0.50
5. One caster to support at least 150lbs - $5.40
6. Two screws to mount your caster ( this also depends on what the caster mounting holes accept) - $0.32
Motor Control:
1. Eight 30amps automotive relays (cheapest I found is herehere) - $19.20
2. Four dual relay sockets (cheapest can be found herehere) - $12.00
3. Two 12V 20AH batteries ( you could really just get one and that would suffice) - $60.00
4. Phidgets 0/16/16 (I bought from TrossenRobotics.com , though eBay sometimes has them) - $99.00
5. Some 22 ga. or thicker black wire( get a 20ft roll and that will be enough for the whole project) -$3.00
6. Some 22ga. or thicker red wire ( 20ft roll will suffice for the whole project as well)-$3.00
7. Different color of electrical tape ( yellow,black,red,white) - $2.69
8. See through plastic cover - $2.00
9. Six L brackets ( each angle is 3" and 2" thick) - $3.00
10. Eight #8 x 1" drywall screws - $0.16
11. One 120V Light Switch w/ at least 14 ga. wires attached - $5.49
Lower Body:
1. Two 14.5" x 8" plywood 3/4" thick -$4.00
2. Two of 11.5" x 8" plywood 3/4" thick - $4.00
3. One of 14.5" x 13" Plexiglas 1/4" thick - $3.00
4. Seventeen #8 x 1" drywall screws - $0.34
5. Three L brackets ( each angle is 3" and 2" thick) - $1.50
6. Six #8 x 1/2" thick plastic spacers - $0.12
Upper Body:
1. One 5.5" x 9" plywood 3/4" thick- $1.00
2. One 5" x 9" plywood 3/4" thick - $1.00
3. Two 10" x 21" plywood 3/4" thick - $4.00
4. One 9" x 11.5" plywood 3/4" thick - $1.00
5. One 9" x 21" plywood 3/4" thick - $2.00
6. One 12VDC Automotive MiniFridge - $15.00 ( got lucky on eBay)
7. Six L brackets( each angle is 3" and 2" thick)-$3.00
8. Two #8-32 x 1/4" machine screw with two nuts and washers- $0.50
9. Twenty two #8 x 1" drywall screws - $0.44
Robot's Head:
1. 12" diameter cake cover - $1.29
2. One 1.5" dia. PVC slip-joint nut - $0.75
3. One PVC 7" x 1.5" diameter $ 3.00
4. One webcam - $5.00 ( eBay is a wonderful place)
Robot Arms :
1. Robot Arm Grabber Toy - $10
2. Two 1.5" dia. PVC slip-joint nut - $1
3.One 2" length PVC coupling - $0.50
4. Two 1.5" dia. PVC threaded pipe that is at least 4" long ( this can be cut into a straight piece) - $1
5. Two 17" x 1.5" dia. PVC pipe - $ 4.00
6. Five L brackets( each angle is 3" and 2" thick) - $2.75
7. Four #8 x 1.75" drywall screws - $0.08
8. Four small L brackets ( servocity has similar http://servocity.com/html/534-633_bracket.htmlones, but theres always eBay :P ) - $0.60
9. One 6V NimH battery(I used that) or 6V battery pack(cheaper) - $11
10. HS-425BB servo( electronics were fried so I got it cheap) - $5
11. Rim of a 4" dia. Lego Wheel- $0.15
12. 1.5" dia. duct connector - $3.00
13. Motorized back wheels of toy R/C car - $1.00 ( eBay has a large selection of broken R/C cars whose motors still work)
14. Two skinny L brackets ( its like 3" long at each angle but only 1/2" wide) - $0.50
15. Eleven #8 - 1" drywall screws - $0.22
Plus the laptop of choice --- this can be anywhere from $100 - $3000 . I used an old one that was lying around
Also I want you all to know that around 50% of all the parts I had from beforehand in my workshop so it only costed me like 50% of the total price listed here. You too probably have a bunch of the above parts lying around your house or perhaps you have friends who would be willing to donate parts, just use your resources and you could make this thing much cheaper than it is now.
Total Bill: $420.14 + laptop of choice
Building the Chassis

The first step to building a butler robot is to construct a chassis.
The chassis is probably the most important part of the robot. If this fails than the entire robot is practically pointless. This is the foundation of the robot. The chassis is the mode of transportation of the robot.
For motors I decided to use preowned wheelchair motors since they were pretty cheap ( ~$70 on eBay) and since they can handle a very heavy load .
What to ask when buying a wheelchair motor:
The chassis is probably the most important part of the robot. If this fails than the entire robot is practically pointless. This is the foundation of the robot. The chassis is the mode of transportation of the robot.
For motors I decided to use preowned wheelchair motors since they were pretty cheap ( ~$70 on eBay) and since they can handle a very heavy load .
What to ask when buying a wheelchair motor:
- Do the motors actually work?
- Do the motors come with wheels attached?
- Do they draw more than 15 amps per hour?
- Do they have too high RPM? ( this is relative to your application )
- Do the motors have bad gears that make a lot of noise when turning?
Choosing the Right Materials


The material we need for the chassis needs to be strong and able to support massive pounds. I went along with wood , though plexiglass will be okay. Make sure you use 3/4" thick wood . Any thinner will not really support the weight. 1" is okay also, but its just extra weight.
I used: 14" x 21" and 3/4" thick
Mounting the Motors



You then mount each wheelchair motor to a piece of wood or plexiglas using the mounting holes as shown in the picture. Use washers and the appropriate sized thread when securing the motors to the material. Try to align the sides of the motors with the wood so that the wheels are aligned straight.
Mounting the Caster Wheel



Get a caster that can support 250 pounds . I purchased one from Home Depot, but any caster that can support 250 lbs. is good.
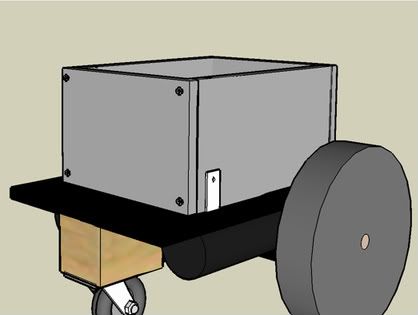
Attach the caster to the base as shown in the picture.
Now you should have a base looking something like the last picture attached.
Attach the caster to the base as shown in the picture.
Now you should have a base looking something like the last picture attached.
Building the Motor Control System


After the chassis is complete we have to make an interface to the motors so that we can control it from a laptop.
The two best methods to control a motor are using a MOSFET motor driver or using a relay. Since I am all about making a robot from common parts and taking advantage of everything available , I used relays. The only downside of a relay is that they cannot be PWMed , which in plain english means you can't have speed control with relays.
For those who have 125 dollars to spend on motor interface , they can get a serial motor controllera serial motor controller which does have speed control and can handle around 20 amps.
For the majority who dont have that cash to spend, you guys will use automotive relays. The relays I used can be found herehere. Make sure that you getthis socket this socket also. The socket is awesome because it has color coded wires AND it allows you to replace relays easily. You need a total of 8 relays and a total of 4 dual relay sockets.
The two best methods to control a motor are using a MOSFET motor driver or using a relay. Since I am all about making a robot from common parts and taking advantage of everything available , I used relays. The only downside of a relay is that they cannot be PWMed , which in plain english means you can't have speed control with relays.
For those who have 125 dollars to spend on motor interface , they can get a serial motor controllera serial motor controller which does have speed control and can handle around 20 amps.
For the majority who dont have that cash to spend, you guys will use automotive relays. The relays I used can be found herehere. Make sure that you getthis socket this socket also. The socket is awesome because it has color coded wires AND it allows you to replace relays easily. You need a total of 8 relays and a total of 4 dual relay sockets.
Powering the Motor Control System


The motors will be powered by either one or two 12V lead acid battery(ies) OR buy two 6V batteries. The battery(ies) that you buy must be able to provide at least 20AH each. If you decide to go with two 12V batteries you wire the batteries in parallel, if they are two 6V batteries then you wire them in series. If its only one 12V battery then obviously you just directly connect wires to the battey without any hitch.
The relays need their own separate supply of 12V to actuate them . The relays will be actuated by the the main 12 volt power supply of the motors. The reason we can't connect them directly to the computer switching circuit ( we will deal with that in the next step) is because that circuit can only handle 4 amps , and our motors draw 11 amps each . The relays draw less than 4 amps and can therefore control the motors easily.
The relays need their own separate supply of 12V to actuate them . The relays will be actuated by the the main 12 volt power supply of the motors. The reason we can't connect them directly to the computer switching circuit ( we will deal with that in the next step) is because that circuit can only handle 4 amps , and our motors draw 11 amps each . The relays draw less than 4 amps and can therefore control the motors easily.
Preparing to Make the Controller Circuit


Step 1: Know what everything does - the relays ,Phidgets interface, and the batteries
Before we actually start making the relay motor controller circuit let's examine what a relay is and how it works.
Read the HowStuffWorks Article on Relays.
You should now understand that a relay is an electromagnet and a switch, and when the electromagnet has electricity running through it the switch closes, but otherwise the switch is open. The switch in our relay will turn on or turn off a motor. You need 4 relays to make a motor be able to go forwards and reverse. If you want to understand how that works have a look at this page.
The electromagnet will be turned on by a neat piece of hardware called a Phidgets Interface Kit. That is the hardware that will interface the computer to the relays. The interface board consists of 16 inputs and 16 outputs. Right now we are interested in the digital outputs. The outputs are just digital switches that switch to ground.
In the diagram attached you can see that between points 85 and 86 there is the electromagnet which pulls the switch between 87 and 30 using its magnetic pull.
Before we actually start making the relay motor controller circuit let's examine what a relay is and how it works.
Read the HowStuffWorks Article on Relays.
You should now understand that a relay is an electromagnet and a switch, and when the electromagnet has electricity running through it the switch closes, but otherwise the switch is open. The switch in our relay will turn on or turn off a motor. You need 4 relays to make a motor be able to go forwards and reverse. If you want to understand how that works have a look at this page.
The electromagnet will be turned on by a neat piece of hardware called a Phidgets Interface Kit. That is the hardware that will interface the computer to the relays. The interface board consists of 16 inputs and 16 outputs. Right now we are interested in the digital outputs. The outputs are just digital switches that switch to ground.
In the diagram attached you can see that between points 85 and 86 there is the electromagnet which pulls the switch between 87 and 30 using its magnetic pull.
Wiring the Relays for Motor A

Step 2: Wiring the relays for Motor A
You should have 8 relays and 4 dual sockets. Put each relay in its designated socket.
The following steps are only for two dual sockets ( four relays). The other two remaining dual sockets will get a different wiring which will be detailed in step number three.
By the way whenever I say to connect the wires , I mean to solder them together. Also, the wheelchair motors should have four wires coming out. There are two thick ones and two skinny ones. Leave the skinny ones alone for now. The thick ones should also be different colors, usually blue and red. If its different colors then just know that I refer to one of the wires as the blue wire and the other one as the red wire.
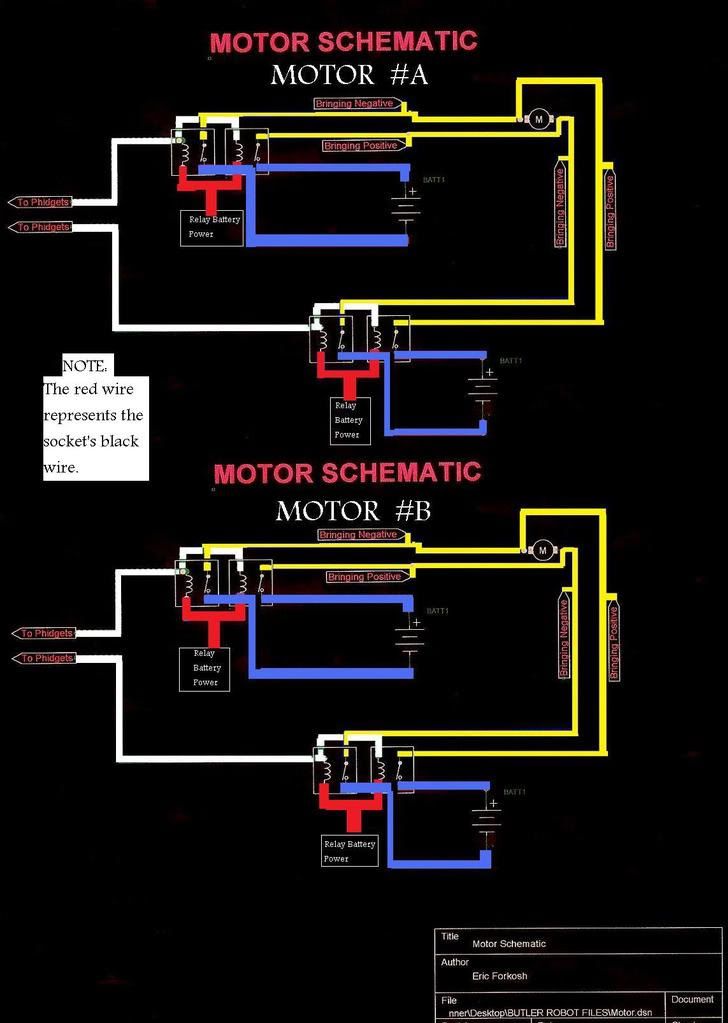
You can either follow the steps below or just read this schematic and follow it. Make sure you follow the shematic by color code.
Schematic
{kind=link}
A. First Dual Socket:
1. One of the relays in the dual socket
Here is the color code key for the wires for the one of the relays on the socket , do this for only ONE of the relays:
BLUE- Connect to power( the positive ) of the motor's batteries. This is the motor's battery's , not the batteries for the relays.
BLACK- Connect to the ground(negative) of the relay's battery
YELLOW- Connect to the blue wire of the motor
WHITE- Leave alone for now
RED - Not used in this project so you could just rip it out or whatever
2. The other relay in the dual socket
Now for the OTHER relay thats in the same dual socket as the other one we just did:
BLUE- Connect to ground( the negative) of the motor's batteries. This is the motor's battery's , not the batteries for the relays.
BLACK- Connect to the ground(negative) of the relay's battery
YELLOW- Connect to the red wire of the same motor used above
WHITE- Connect to the white wire of the other relay in the same dual socket
RED - Not used in this project so you could just rip it out or whatever
Now that we are done with that dual socket , so set it aside. Pickup the second dual socket.
B. Second Dual Socket:
1. One of the relays in the dual socket
Here is the color code key for the wires for the one of the relays on the socket , do this for only ONE of the relays:
BLUE- Connect to power( the positive ) of the motor's batteries. This is the motor's battery's , not the batteries for the relays.
BLACK- Connect to the ground(negative) of the relay's battery
YELLOW- Connect to the red wire of the motor
WHITE- Leave alone for now
RED - Not used in this project so you could just rip it out or whatever
2. The other relay in the dual socket
Now for the OTHER relay thats in the same dual socket as the other one we just did:
BLUE- Connect to ground( the negative) of the motor's batteries. This is the motor's battery's , not the batteries for the relays.
BLACK- Connect to the ground(negative) of the relay's battery
YELLOW- Connect to the blue wire of the same motor used above
WHITE- Connect to the white wire of the other relay in the same dual socket
RED - Not used in this project so you could just rip it out or whatever
Wiring the Relays for Motor B
STEP 3: Wiring the Relays for Motor B
Now we have finished the motor control for one of the motors. One motor down, one more to go. The other motor will have the EXACT same wiring as the first motor except that YELLOW wires will go to the second motor and not to the first motor ( which we just finished wiring above) . So follow the exact steps for wiring it again , making sure to wire it to the second motor and not the first.
Now we have finished the motor control for one of the motors. One motor down, one more to go. The other motor will have the EXACT same wiring as the first motor except that YELLOW wires will go to the second motor and not to the first motor ( which we just finished wiring above) . So follow the exact steps for wiring it again , making sure to wire it to the second motor and not the first.
Connecting the Relay's White Wires

After you are done wiring both motors , locate the white wires. From each wire joint ( point where the white wires were soldered together) you need to connect some wire ( NOT ONE OF THE RELAY SOCKET WIRES) to the joint and then leave the end of that wire alone. If you followed the schematic and not the written steps , then you already did this step.
OK so if you followed all the steps correctly you should have four wires(one per dual socket) which are connected on one side to the relays, but are not connected to anything on the other side. You should also have a ton of wires everywhere.
Enclosing the Phidgets and Labeling

I put both my relay circuits in a nice plastic box and closed it up. This protects the relays and also looks nice as well. Notice how neat it looks! I labeled each individual relay. I labeled them by color coded tape and by typed up label.
Mounting the Batteries

If you haven't done so already , mount the batteries. Use L brackets to hold the batteries in place. L brackets are 90 degree brackets of metal that can be found in all hardware stores ( like Home Depot, Lowes, etc.) Just use the L brackets like I used it below to fasten the batteries to the chassis. Make sure the batteries are fastened tightly and don't move, because while the robot is moving you don't want heavy objects like batteries falling out. Also, notice that I put duct tape to cover the battery's terminals. You should do the same because you want to have the battery's terminal covered at all times to prevent short circuits.
Connecting and Mounting the Phidgets

Remember the four wires you have from the wire joint from the relay? Now its time to connect them to the Phidgets. Connect the wires to the Phidgets output ports 0 - 3. Each wire getting its own terminal, order doesn't really matter. Also , connect a wire to the relay battery's ground connection ( negative side) and connect the other end to the two Phidgets terminals closest to output terminals 0 - 3 , they are marked "G". This assigns each output of the Phidget to its own dual relay.
To mount the Phidgets just stick screws or nails through its mounting hole and into the top of the plastic box which encloses your entire relay circuit. If you don't like that , then just mount it anywhere as long as the wires aren't getting to tightly pulled.
To mount the Phidgets just stick screws or nails through its mounting hole and into the top of the plastic box which encloses your entire relay circuit. If you don't like that , then just mount it anywhere as long as the wires aren't getting to tightly pulled.
Connect the Kill Switch

Wheelchair robots are very powerful machines, if something goes wrong and it doesn't stop or something it WILL DO DAMAGE. This is why we need to install a mechanical kill switch. All the switch is , is a standard light switch. The switch should have either two wires or two terminals on the side of it. Just cut the negative wire that is going from the motor's battery to the relays. Now that it's cut , connect a switch in between the two wires. Very simple.
Building an Enclosure for the Motor Control System



When we ended off in the motor control section , the robot had no enclosure and was entirely open and prone to damage.
To make a box for the phidgets and relays you'll first need to measure it out.
If you followed my template then you will need:
- Two pieces of 14 1/2" by 8 " plywood and 3/4" inch thick
- Two pieces of 11 1/2" by 8" plywood , 3/4" thick
- One piece 14 1/2" by 13" plexiglas piece
Now to see if its the correct measurements put the box you just made over the batteries, relays and phidgets. It should fit around them perfectly , as demonstrated below.
Painting the Motor Control Enclosure Silver

Take the the wood enclosure off the chassis and lay it on the floor in a well ventilated area. Now get a canister of silver spray paint or just a bucket of silver paint and a paintbrush. It would also be a good idea to wear gloves right about now. Spray paint the entire outside of the wood in an even coat of paint. Then let it dry for about an hour or two .
Fasten the Wooden Enclosure to the Chassis

Fasten the (now silver and hopefully dry paint) wood enclosure to the chassis using L brackets.
Now it should look like this after you fasten it down with L brackets.
The CAD for this step can be found here:
Now it should look like this after you fasten it down with L brackets.
The CAD for this step can be found here:
{kind=link}
Attaching the Plexiglas Cover



Now take a handful. 1/4" plastic spacers
Nail two or three spacers to each side of the top of the enclosure as show in the picture below:
Take that piece of plexiglass that we cut before and put them on top of the spacers. Then drill holes in the plexiglas so that the holes are over the spacer holes and screw the plexiglass through the spacer into the wood.
Building the Upper Body


After the bottom is completely assembled and the robot is actually starting to like like a robot, we have to build the upper body , which is the part that will really define the butler robot.This stage will also require the most amount of materials.
I used:
I used:
- one 5.5" x 9" plywood and 3/4" thick
- one 5" x 9" plywood piece and 3/4" thick
- two 10" x 21" plywood piece and 3/4" thick
- one 9" x 11.5" plywood piece and 3/4" thick
- one 9" x 21" plywood piece and 3/4" thick
Painting the Wood and the Mini Fridge



Spray paint the wood pieces black and also spray paint the mini-fridge if its not black.
Wear latex gloves so your hands don't get dirty and also be sure to do the painting outdoors , its dangerous to inhale those vapors.
Wear latex gloves so your hands don't get dirty and also be sure to do the painting outdoors , its dangerous to inhale those vapors.
Building the Lower Portion of the Body


Attach the 5.5" x 9" piece to one of the 10" x 21" pieces as shown in the picture below.
Grab the other 10" x 21" piece and attach it to the other end of the 5.5" x 9" piece.
Grab the other 10" x 21" piece and attach it to the other end of the 5.5" x 9" piece.
Building the Upper Portion of the Body



Now attach the 5" x 9" piece to the other end of the wood and stand up the wood so that the 5.5" x 9" piece is on the lower end.
Then take the 11.5" x 9" wood piece and screw it down to the top of the enclosure ( make sure the 5.5" x 9" piece is on the lower end!!!)
Then take the 11.5" x 9" wood piece and screw it down to the top of the enclosure ( make sure the 5.5" x 9" piece is on the lower end!!!)
Installing the Mini-Fridge



Take two L brackets and connect it so that the top of the bracket is 5" above the floor.
Take that mini-fridge and lay it down on top of the L brackets we just put up.
Take that mini-fridge and lay it down on top of the L brackets we just put up.
Finish Installing the Mini-Fridge



To secure the mini-fridge in place use a hot glue gun to glue the sides of the minifridge to the wood.
It should be secured and shouldn't wobble in there. Make sure that you have enough clearance to opne the fridge door.
The mini-fridge should have two black wires coming out from the back. Connect the end of one wire to the positive terminal of the 12V battery and the end of the other wire to the negative terminal. Now whenever the robot turns up the minifridge will be on.
It should be secured and shouldn't wobble in there. Make sure that you have enough clearance to opne the fridge door.
The mini-fridge should have two black wires coming out from the back. Connect the end of one wire to the positive terminal of the 12V battery and the end of the other wire to the negative terminal. Now whenever the robot turns up the minifridge will be on.
Securing the Laptop in Place


The laptop that I dedicated to Chives(my butler robot) was an old one I had and had a 17" screen. Lay the laptop that you have vertically on the space that is in back of the chassis and secure it with L brackets.
Attach the Body to the Plexiglas

Unscrew the plexiglas cover that we put on the motor enclosure place it on the floor . Now put the wooden box we just built on top of it ( aligning it so that its in the center). Secure the wooden box to the plexiglas using two L brackets.
Begin Building the Robot Head

The robot head for your butler robot can be whatever you want . I decided to make a dome shaped head with one eye. Here are the instructions for the robot head that I made:
Get a 12" diameter cake cover and if its not silver yet , then spray paint it silver.
Get a 12" diameter cake cover and if its not silver yet , then spray paint it silver.
Preapring to Build the Eye


Now find a soldering iron that you don't mind destroying. ( you can actually just clean it up afterwards it doesn;t really destroy it)Plug in the soldering iron and wait for it to heat up.
Now find one threaded PVC connector ( 1.5" diameter is what I used).
Make sure the soldering iron is very hot before proceeding to the next step. ( don't touch it with your hand , but if you put water on it and see the water vapor then its hot)
Now find one threaded PVC connector ( 1.5" diameter is what I used).
Make sure the soldering iron is very hot before proceeding to the next step. ( don't touch it with your hand , but if you put water on it and see the water vapor then its hot)
Making the Eye

Hot glue that white PVC piece to the silver dome in the place where you want the eye. Now the soldering iron is nice and hot you need to slowly melt a hole inside the PVC piece you just glued. Make sure you don't melt the actual plastic piece.
Attaching the Robot's Neck

After you melted that hole in the last step , wet the soldering iron with a sponge and unplug it , letting it cool.
Take some PVC pipe ( I used a 7" , 1.5" diameter PVC pipe) and hot glue it to the bottom of the cake cover as shown. Make sure the PVC is attached securely.
Attaching the Webcam

Find that webcam that you will dedicate for this butler robot ( I used Quickcam Pro 4000 ) and glue it so that the lens of the camera is looking through that hole we melted.
Attaching the Whole Head to the Body

Now the glue the other end of the PVC pipe to the center of the top piece of the wood platform we made.
Cool head isn't it?
Cool head isn't it?
Getting the Gripper for the Left Robot Arm

The gripper that will be used was taken from one of those robot arm extender toys. Make sure the gripper is motorized.
Build the Gripper Part


You will also need the following PVC parts , I believe one is called a threaded PVC connector and the other is a 2" length pipe with a piece of plastic sticking out in the back.
Put the threaded connector over the pipe piece and connect the end of that pipe to the gripper. Hot glue the end of the pipe to the gripper.
Put the threaded connector over the pipe piece and connect the end of that pipe to the gripper. Hot glue the end of the pipe to the gripper.
Build the Arm Section


Now take any piece of PVC pipe that is threaded on the end and cut the pipe around three inches from where the threaded part begins.
Hotglue that piece that was just cut to the end of a different 15" PVC pipe
Hotglue that piece that was just cut to the end of a different 15" PVC pipe
Paint the Gripper and the Arm

Now take both pieces outside and spray paint them black. Use the same spray paint color you used on the body
After its dry you can attach the gripper to the pipe by just twisting the threaded connector on top of the threaded portion of the long PVC pipe.
After its dry you can attach the gripper to the pipe by just twisting the threaded connector on top of the threaded portion of the long PVC pipe.
Motorizing the Arm

Now take one of the two Power Wheels motors and mount the long PVC pipe of the robot arm to it , using some small L brackets.Use hot glue if you want to secure it more.
Mounting the Arm Motor

Mount the motor to the body using two screws and to secure it further hot glue the back to the wooden body.
What You Should Have So Far.......

If you followed everything correctly you should have a robot body that resembles the one below.Just make sure you got this done and then we will go on to the next steps where we mount the other arm and mount the whole body to the motorized chassis.
Pretty cool , huh?
Pretty cool , huh?
Preparing to Build the Right Arm

Take another piece of the 17" PVC pipe and attach a threaded connector.
Paint and Mount the Right Arm

Spray paint that black and mount it to a motor with two small L brackets(one on top and one on bottom) as we did before to the other arm. Use hotglue if needed to secure the arm.
Make sure that both arms are secure before proceeding to the next step.
Make sure that both arms are secure before proceeding to the next step.
Check Over Your Work


Your robot's body from the front should look like the pictures attached. A back view picture is also attached.
Connect Secondary Motors( Non Driving Motors) to Secondary Battery

There should be two wires coming from each motors. Connect the red wires from each of the motors and connect those red wires to the positive terminal of the 6V battery pack.
Connect Secondary Motors to Phidgets

Connect the Negative terminal of that 6V battery to the negative of the 12V battery ( which is common ground) then connect the black wire of the left arm motor to Output #6 , and the black wire of the right arm motor to Output #7.
Extend the Wires on the Gripper Motor

Solder on wires to the existing wires connected to the gripper and connect the red wire to the positive terminal of the 6V battery and the black wire to output #15.
Modifying the Pouring Servo

Open up the servo for pouring and solder on longer wires to the motor terminals. ( the red and black wires pictured)
Attach the Pouring Connector

Attach the connector ( which is a rim of a toy wheel) to the axle of the motor using
Attach the Servo's Connector to the Bottle Holder

Attach the servo connector to the pipe connector and tighten them together.Then mount the servo the PVC pipe arm of the right arm using screws or hotglue.
Glue on the Bottle Cap Opener

Hotglue the motorized wheel to the bottle holder on an angle so that the wheel brushes against the cap of the bottle.
Picture isnt showing for some reason , so the link for it is here:
Picture isnt showing for some reason , so the link for it is here:
Extend Wires on Bottle Cap Opener

Solder on longer wires to the motorized wheel . Connect the red wires of both the servo motor and the motorized wheel to the positive terminal of the 6V batttery. Connect the black wire of the servo to Output #8 of the Phidgets. The black wire of the motorized wheel should be connected to Output #9.A cup can be attached on a L bracket if you want to add one.
Check It Out!!!!
Fasten everything down to the body and double check to make everything is in order . Now look at your butler robot, pretty cool isn't it?
In the next steps we'll give it its intelligence.
In the next steps we'll give it its intelligence.
Introduction to the Software

The software that Chives runs off was created in Visual Basic 6 and makes heavy use of Microsoft Vista's Speech Recognition Tool.
The minimum laptop requirements for the butler robot are as follows:
1. Runs any version of Windows Vista
2. At least 512 MB RAM
3. Two USB ports
4. Wifi Adapter ( Built-in or USB)
5. Speakers (Built-in or USB)
You will need to install/ setup the following programs and drivers:
1. Microsoft Visual Basic 6 ( if you want to edit and run the butler robot's program)
or if you want to only run the butler robot's softwareinstall this runtime fileinstall this runtime file
2. Setup Microsoft Vista Speech Recognition
3. CCRP Timer Object
4. Phidgets 21 Installer Package
5. Free Voip Calling from Robot
6. RoboRealm
The minimum laptop requirements for the butler robot are as follows:
1. Runs any version of Windows Vista
2. At least 512 MB RAM
3. Two USB ports
4. Wifi Adapter ( Built-in or USB)
5. Speakers (Built-in or USB)
You will need to install/ setup the following programs and drivers:
1. Microsoft Visual Basic 6 ( if you want to edit and run the butler robot's program)
or if you want to only run the butler robot's softwareinstall this runtime fileinstall this runtime file
2. Setup Microsoft Vista Speech Recognition
3. CCRP Timer Object
4. Phidgets 21 Installer Package
5. Free Voip Calling from Robot
6. RoboRealm
Verify Connections

After installing everything verify that the Phidgets Interface Kit Outputs are connected to their appropriate components. If something is wrong then just make the proper connections.
Output(0) = Relay for Left Motor to turn forward
Output(1)= Relay for left motor to turn in reverse
Output(2) = Relay for right motor to turn forward
Output(3) = Relay for right motor to turn in reverse
Output(6) = Left arm motor
Output(7) = Right arm motor
Output(9)= Bottle Cap Opener motor
Output(10)= Bottle tilter
Output(15) = Gripper Motor
Output(0) = Relay for Left Motor to turn forward
Output(1)= Relay for left motor to turn in reverse
Output(2) = Relay for right motor to turn forward
Output(3) = Relay for right motor to turn in reverse
Output(6) = Left arm motor
Output(7) = Right arm motor
Output(9)= Bottle Cap Opener motor
Output(10)= Bottle tilter
Output(15) = Gripper Motor
Downloading the Code

The code can be downloaded from this page . Just download it , unzip it , and run the self installer .
Be sure to read the description in the self installer - it has important information.
This is version 1 of the code. Look on my blog ( eRobots.BlogSpot.com) for the most updated version.
This code has the following features:
Voice Control Over the Following:
1. Drive in all four directions - distance in "units"
2. Speak the Current Time
3. Speak the Temperature in Your Area
4. Speak the Weather Conditions
5. Pour a Drink
6. Raise Right Arm
7. Raise Left Arm
8. Close gripper
9. Various Sound Effects ( gun shot , load gun , laugh , etc.)
Text to Speech Warning of the Following:
1. No internet connection
2. Low Battery
3. Being Remote Server Operated now
This code is a stable release . My program with Voip and Roborealm interface has some bugs , so I'll only release that when I get all those bugs worked out.
In the next few tutorials I will be explaining parts of the code so that you will be able to edit it to your liking.
To run my program do the following. Launch Vista Speech recognition and get it out of sleep mode and have it listen. Then launch my program . Now speak the commands and Vista Speech will click the commands that are in my program.
Be sure to read the description in the self installer - it has important information.
This is version 1 of the code. Look on my blog ( eRobots.BlogSpot.com) for the most updated version.
This code has the following features:
Voice Control Over the Following:
1. Drive in all four directions - distance in "units"
2. Speak the Current Time
3. Speak the Temperature in Your Area
4. Speak the Weather Conditions
5. Pour a Drink
6. Raise Right Arm
7. Raise Left Arm
8. Close gripper
9. Various Sound Effects ( gun shot , load gun , laugh , etc.)
Text to Speech Warning of the Following:
1. No internet connection
2. Low Battery
3. Being Remote Server Operated now
This code is a stable release . My program with Voip and Roborealm interface has some bugs , so I'll only release that when I get all those bugs worked out.
In the next few tutorials I will be explaining parts of the code so that you will be able to edit it to your liking.
To run my program do the following. Launch Vista Speech recognition and get it out of sleep mode and have it listen. Then launch my program . Now speak the commands and Vista Speech will click the commands that are in my program.
Downloads
Explanation of Subroutines and Functions

I have included in the code a lot of subroutines and functions to make the code easier to use and easier to understand .
Here is a list of the major subroutines and functions
1. Speak
The Speak subroutine will play the sound file which is specified . All sound files must be in the "Voice" folder in order to play.
The syntax for the Speak subroutine is : Speak (filename as String)
ex: Speak "File1" - this will play the sound file "File1.wav" which is in the folder "Voice"
Note: For variables such as weather conditions make sure that the proper sound file exists for the condition.
2. Pause
The Pause subroutine will as it's name implies pause the code for a certain amount of milliseconds.The Pause function uses the Sleep function( a Win32 function) , but before sleeping it makes sure that all prior commands were fully completed.
Syntax for the Pause subroutine is : Pause (milliseconds as Integer)
ex: Pause 2000 - this will sleep for 2000 milliseconds a.k.a 2 seconds
3. Drive
The Drive subroutine is responsible for controlling the drive motors. The subroutine requires two variables to be filled in order to work. The two variables that it relies on are strDriveDirection and strUnits. strDriveDirection is a public variable because that way the direction can be set separately and in a different procedure than strUnits.
strDriveDirection tells the subroutine which drive relays to activate and strUnits tells the subroutine how long to activate the relays.
Syntax for the Drive subroutine is:
strDirection = (direction as String)
Drive (milliseconds as Integer)
ex: strDirection = "Forward" ' set the Direction to forward
Drive 3000 'Drives for 3000 milliseconds or 3 seconds
4. Get_Time
The Get_Time public subroutine returns the current time in a variety of variables. It has the ability to separate the time into the singles and tens place, set the time to 12 hour time, divide the day into AM and PM, and even divide the day into day phases(e.g. afternoon).
The syntax for it is either Get_Time or Call Get_Time
It returns the following public variables:
strDayDivider - this is either AM or PM
strHours - the amount of hours in 12 hour time ( maximum is 12)
strRawHours- the amount of hours in 24 hour time ( maximum is 24)
strRawMinutes- the amount of minutes ( double digit)
strSinglesMinutes- the amount of minutes in the singles place only ( single digit)
strTensMinutes- the amount of minutes in the tens place only ( e.g. 30 , 40 , 50 )
strDayPhase - either "Morning" , "Afternoon", or "Night"
5. Get_Weather_Info
Gets the weather information( temperature and conditions) and returns public variables.
The syntax is either Get_Weather_Info or Call Get_Weather_Info
It returns the following public varables:
strTemperature - temperature in degrees farenheit ( double digit)
strDegrees_Singles - temperature in the singles place only ( single digit)
strDegrees_Tens - temperature in the tens place onle ( e.g. 10 , 20 , 30 , 40)
strFeels_Like - feels like temperature in degrees farenheit ( double digit)
strFeels_Like_Singles - feels like temperature in the singles place only (single digit)
strFeels_Like_Tens - feels like temperature in the tens place only (e.g. 10, 20 ,30)
strWeather_Conditions - the weather conditions outside ( can be anything from herehere )
There are many other minor subroutines and functions , but the average user will not need to use them .
6. HighOutput
This subroutine sets the assigned port number a logical high or on.
syntax HighOutput(portnumber as integer)
ex: HighOutput (9) - Turns on Output 9 of the Phidgets
7. LowOutput
This subroutine sets the assigned port number a logical low or off
syntax LowOutput(3) - Turns off Output 3 of the Phidgets
Here is a list of the major subroutines and functions
1. Speak
The Speak subroutine will play the sound file which is specified . All sound files must be in the "Voice" folder in order to play.
The syntax for the Speak subroutine is : Speak (filename as String)
ex: Speak "File1" - this will play the sound file "File1.wav" which is in the folder "Voice"
Note: For variables such as weather conditions make sure that the proper sound file exists for the condition.
2. Pause
The Pause subroutine will as it's name implies pause the code for a certain amount of milliseconds.The Pause function uses the Sleep function( a Win32 function) , but before sleeping it makes sure that all prior commands were fully completed.
Syntax for the Pause subroutine is : Pause (milliseconds as Integer)
ex: Pause 2000 - this will sleep for 2000 milliseconds a.k.a 2 seconds
3. Drive
The Drive subroutine is responsible for controlling the drive motors. The subroutine requires two variables to be filled in order to work. The two variables that it relies on are strDriveDirection and strUnits. strDriveDirection is a public variable because that way the direction can be set separately and in a different procedure than strUnits.
strDriveDirection tells the subroutine which drive relays to activate and strUnits tells the subroutine how long to activate the relays.
Syntax for the Drive subroutine is:
strDirection = (direction as String)
Drive (milliseconds as Integer)
ex: strDirection = "Forward" ' set the Direction to forward
Drive 3000 'Drives for 3000 milliseconds or 3 seconds
4. Get_Time
The Get_Time public subroutine returns the current time in a variety of variables. It has the ability to separate the time into the singles and tens place, set the time to 12 hour time, divide the day into AM and PM, and even divide the day into day phases(e.g. afternoon).
The syntax for it is either Get_Time or Call Get_Time
It returns the following public variables:
strDayDivider - this is either AM or PM
strHours - the amount of hours in 12 hour time ( maximum is 12)
strRawHours- the amount of hours in 24 hour time ( maximum is 24)
strRawMinutes- the amount of minutes ( double digit)
strSinglesMinutes- the amount of minutes in the singles place only ( single digit)
strTensMinutes- the amount of minutes in the tens place only ( e.g. 30 , 40 , 50 )
strDayPhase - either "Morning" , "Afternoon", or "Night"
5. Get_Weather_Info
Gets the weather information( temperature and conditions) and returns public variables.
The syntax is either Get_Weather_Info or Call Get_Weather_Info
It returns the following public varables:
strTemperature - temperature in degrees farenheit ( double digit)
strDegrees_Singles - temperature in the singles place only ( single digit)
strDegrees_Tens - temperature in the tens place onle ( e.g. 10 , 20 , 30 , 40)
strFeels_Like - feels like temperature in degrees farenheit ( double digit)
strFeels_Like_Singles - feels like temperature in the singles place only (single digit)
strFeels_Like_Tens - feels like temperature in the tens place only (e.g. 10, 20 ,30)
strWeather_Conditions - the weather conditions outside ( can be anything from herehere )
There are many other minor subroutines and functions , but the average user will not need to use them .
6. HighOutput
This subroutine sets the assigned port number a logical high or on.
syntax HighOutput(portnumber as integer)
ex: HighOutput (9) - Turns on Output 9 of the Phidgets
7. LowOutput
This subroutine sets the assigned port number a logical low or off
syntax LowOutput(3) - Turns off Output 3 of the Phidgets
Videos

Here are a bunch of videos demonstrating the butler robot's abilities.
Updates

For updates on my butler robot project check out my blog
eRobots.BlogSpot.comeRobots.BlogSpot.com
Warning:
This project can be very dangerous if you are not careful. Be careful and scared of your tools. Do not do anything stupid which could be dangerous to your health . I am not liable for any injuries, death, or any damage that might have occured by following this tutorial.
Also , you should be afraid of your robot . When this thing is on , it has a lot of torque and its probably stronger than you and can push you over and run you over.
eRobots.BlogSpot.comeRobots.BlogSpot.com
Warning:
This project can be very dangerous if you are not careful. Be careful and scared of your tools. Do not do anything stupid which could be dangerous to your health . I am not liable for any injuries, death, or any damage that might have occured by following this tutorial.
Also , you should be afraid of your robot . When this thing is on , it has a lot of torque and its probably stronger than you and can push you over and run you over.