Omnidirectional & Mecanum Wheels
by VicenzaThunders in Circuits > Robots
681 Views, 13 Favorites, 0 Comments
Omnidirectional & Mecanum Wheels



The omnidirectional wheels are special wheels which allow movements in all directions.
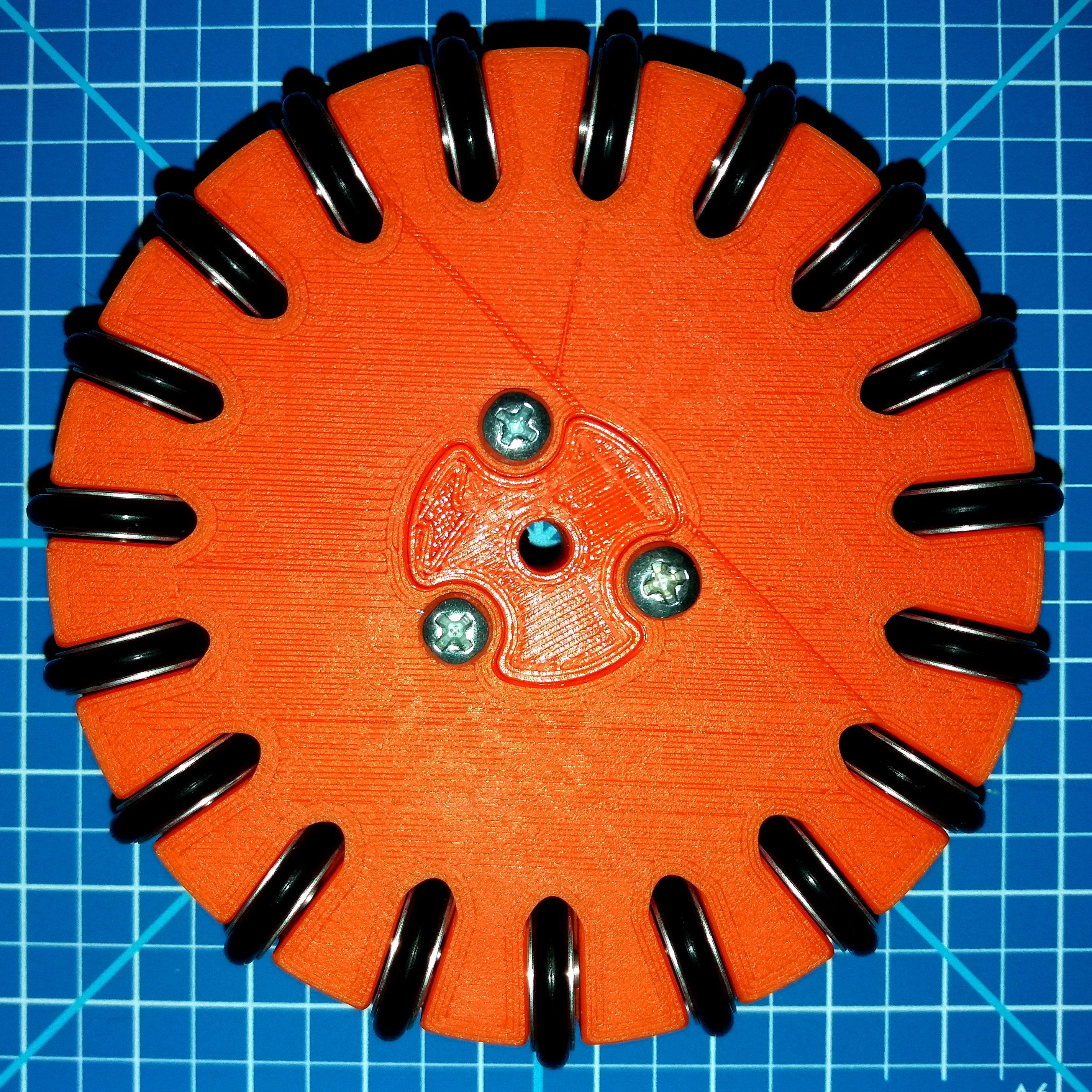
On these wheels there are rollers around their perimeter, these particular rollers has the axis which is perpendicular to the one of the wheel and they can rotate freely and this characteristic allows the wheel to move in any direction.
The mecanum wheels are a kind of special wheels which, like the other omnidirectional wheels, allow movement in all directions.These particular wheels were designed by Bengt Ilon in 1973, during the period when he worked for the Swedish company Mecanum AB from which they took their name. Later, in the '80s, the patent was acquired by the Navy of the United States which used these wheels to carry items aboard of the ships. Unlike the other omnidirectional wheels, these ones mount rollers which have axes rotated more or less 45°, depending on which kind they are: RH or LH.
We started working with omnidirectional wheels when we participated at the RoboCup making robots which plays soccer. However, finding no models of these wheels at a good price and with the technical characteristic that we wanted, we decided from the beginning of making them by ourselves. The wheels that you see here on our website are the ones derived from years of practical experience and progressive improvements.
Our website: http://www.vicenzathunders.com/products
How to Use Omnidirectional Wheels? (4 Wheels Mode)







Using four omnidirectional wheels on a robot, positioned as in the graph, and managing the speed of rotation of each of them, we can make the robot move in any direction. The animated image shows the basic movements that are obtained by combining the speed and direction of rotation of these special wheels; these ones could already be enough, but the possible combinations are actually unlimited. This happens because, to calculate the speed and the trajectory of the robot movements, we must calculate the resultant of the speed vector sum of the wheels and the moment sum produced by them: if they are both different from zero, the robot will move along a circular trajectory of radius larger or smaller depending on what combinations we choose; instead, if the speed sum is equal to zero and the moment sum isn't, the robot will rotate on itself; while, if the moment sum is equal to zero and the speed sum isn't, then the robot will make a rectilinear movement. Of course, in reality these movements are approximated because it is difficult to have all four wheels on the ideal position and it is also difficult to make them move with the ideal speed: these approximations cause errors that in most of cases can be ignored, but you should keep it in mind if you need precise movements.This is our #ThunderRobot that uses four of these wheels: watch the video.
How to Use Omnidirectional Wheels? (3 Wheels Mode)









Exactly like in the previous situation, using three omnidirectional wheels on a robot, positioned as in the graph at right, and managing the speed of rotation of each of them, we can make the robot move in any direction. Most of the considerations that we made in the description of the case with four wheels are equal for this case, the main differences are that with three wheels the maximum speed is lower and the difficulty of managing the movements is greater. However, having a wheel in less, and so a motor in less too, the robot is lighter and this can be useful in situations where weight is an important factor. The animated image shows the basic movements that are obtained by combining the speed and direction of rotation of these special wheels. Pay attention that in the cases of shift to the right and to the left the arrows are smaller, this indicates that to make these movement the speed of these wheels must be 50% of the wheel of the opposite side; this because, as mentioned before, in order to make the robot make a rectilinear movement we need that the moment sum produced by the wheels is zero.This is our #ThunderOmnibot that uses three of these wheels: watch the video.
How to Use Mecanum Wheels?






Using four mecanum wheels on a robot, positioned as in the graph at right, and managing the speed of rotation of each of them, we can make the robot move in any direction. The animated image shows the basic movements that are obtained by combining the speed and direction of rotation of these special wheels. How they work is very similar to how the omnidirectional wheels work, in fact, also in this case to calculate the speed and the trajectory of the robot movements, we must calculate the resultant of the speed vector sum of the wheels and the moment sum produced by them. Pay particular attention that in the animation, near the wheels, there are letters A and B, these indicate the two types of mecanum wheels, RH and LH, which work in the opposite way. For example, when a RH wheel is sliding to the left it also rotates forward, while a LH wheel rotates backwards. Therefore, combining these features, you get the movements shown in the animation.
You can notice that the combinations are the same that are described for four omnidirectional wheels.
Too See More...

To see better animations and to know more, visit our website:
http://www.vicenzathunders.com/thunderwheels
and follow us on facebook:
https://www.facebook.com/vicenza.thunders
Thanks!